MR1柔性軟纜式磁致伸縮位移傳感器
MR1柔性軟纜式磁致伸縮位移傳感器的原理是利用兩個不同磁場相交時產生一個應變脈沖信號
,然后計算這個信號被探測所需的時間周期,從而換算出準確的位置
。這兩個磁場一個來自磁環(huán)中的永磁鐵
,另一個來自傳感器電子倉中的電子部件產生的激勵脈沖。激勵脈沖沿傳感器內用磁致伸縮材料制造的波導絲以聲速運行
。
咨詢熱線:13812857865
內容介紹
/ introduce
一、MR1柔性軟纜式磁致伸縮位移傳感器概述:
在鐵磁質中磁化方向的改變會引起介質晶格間距的改變,從而使得鐵磁質的長度和體積發(fā)生改變,即:磁致伸縮現(xiàn)象,也稱為威德曼效應,其逆效應稱為維拉里效應。
磁致伸縮位移傳感器的原理是利用兩個不同磁場相交時產生一個應變脈沖信號,然后計算這個信號被探測所需的時間周期
,從而換算出準確的位置。這兩個磁場一個來自磁環(huán)中的永磁鐵
,另一個來自傳感器電子倉中的電子部件產生的激勵脈沖
。激勵脈沖沿傳感器內用磁致伸縮材料制造的波導絲以聲速運行
。當與磁環(huán)中的永磁場相交時
,由于磁致伸縮現(xiàn)象,波導絲產生的機械振動形成一個應變脈沖
。應變脈沖很快便被電子倉中的感測電路探測到
。從產生激勵脈沖的一刻到應變脈沖被探測到總的時間乘以固定的聲速,我們便能準確的計算出磁鐵的位置變化
。這個過程是連續(xù)不斷的,所以每當磁環(huán)位置改變時
,新的位置會被迅速測量出來
。由于輸出信號是真正的位置值,而不是比例的或需要再放大處理的信號,所以不存在信號漂移或變值的情況
,更不必像其他傳感器那樣需要定期重標
。
磁致伸縮傳感器為非接觸式,永不磨損。具有高分辨率、高精度
、高穩(wěn)定性
、高可靠性、響應時間快
、工作壽命長等優(yōu)點
。傳感器不用重新標定
,也不用定期維護。
二、
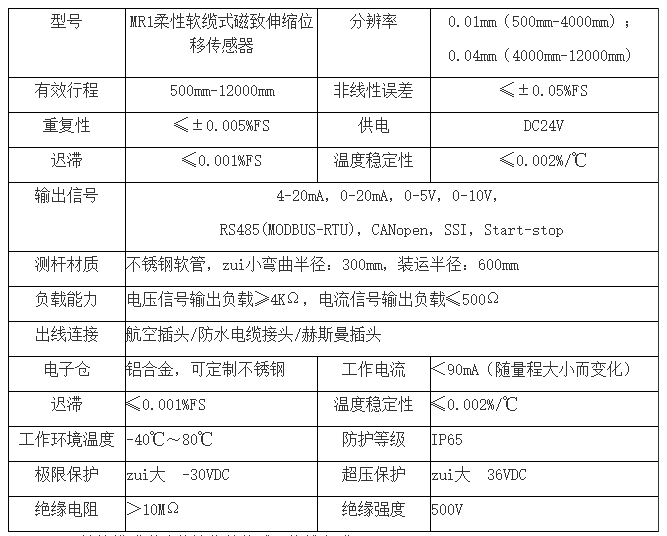
MR1柔性軟纜式磁致伸縮位移傳感器技術參數(shù):
三、
MR1柔性軟纜式磁致伸縮位移傳感器接線方式:
1.防水接頭接線方式(RS485(MODBUS-RTU)信號輸出):
傳感器共有五個接點:正電源(棕)、電源地(黑)
、RS485A(藍)、RS485B (白)
、殼體地(屏蔽線)
2.航空插頭接線方式(RS485(MODBUS-RTU)信號輸出):
傳感器共有五個接點:①正電源(棕)、②電源地(黑)、③RS485A(藍)
、④RS485B (白)、⑤殼體地(屏蔽線)
3.防水接頭接線方式(SSI信號輸出):
傳感器共有五個接點:正電源(棕)、電源地(黑)
、
時鐘正(綠)、時鐘負(白)、數(shù)據(jù)正(紅)
、數(shù)據(jù)負(黃)
、
殼體地(屏蔽線)
4.航空插頭接線方式(SSI信號輸出):
傳感器共有五個接點:①正電源(棕)、②電源地(黑)、③
時鐘正(綠)、④時鐘負
(白)、⑤
數(shù)據(jù)正(紅)、⑥數(shù)據(jù)負(黃)、⑦
殼體地(屏蔽線)
5.防水接頭接線方式(CAN open信號輸出):
傳感器共有五個接點:電源正(棕)、電源負(黑)、
CAN-H(藍)、CAN-L(白)
、接地(屏蔽線)
6.航空接頭接線方式(CAN open信號輸出):
傳感器共有五個接點:①電源正(棕)、②電源負(黑)、③CAN-H(藍)
、④CAN-L(白)
、⑤接地(屏蔽線)
四、
MR1柔性軟纜式磁致伸縮位移傳感器應用領域:
伺服液壓油缸活塞位置預置和反饋,伺服氣缸活塞位置預置和反饋 ,研磨機械位置預置和反饋
,鑄造鍛壓機床位置預置和反饋,其他機械如龍門機床位置預置和反饋
,掘進機
、盾構機
、煤礦機械油缸位置預置和反饋
,工程提升機械油缸位置預置和反饋,軋鋼機等鋼廠機械油缸位置預置和反饋
,吹瓶機油缸位置預置和反饋
,注塑機械油缸位置預置和反饋,鐵路
、橋梁的調節(jié)
,水位的檢測、水閘的控制
,木材機械位置預置和反饋
,油缸液位的位置預置和反饋
,化工容器液位的位置預置和反饋
,飲用水和污水處理系統(tǒng),大地測量系統(tǒng)
,閘門開度的位置預置和反饋
,油缸液位的測量。
五、
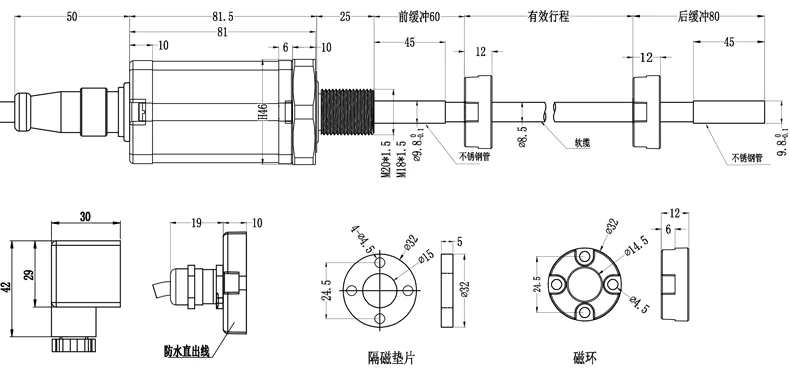
MR1柔性軟纜式磁致伸縮位移傳感器安裝尺寸圖:
-
關注我們
-

-
掃一掃
-
聯(lián)系方式
-
電話:13812857865
-
網址:m.jxjunrun.com
-
地址:湖北省襄陽市高新技術開發(fā)區(qū)團山鎮(zhèn)追日路碧桂園星薈11幢20層11-20-008
-
 官方直營
官方直營 全國聯(lián)保 關于我們 | 聯(lián)系我們
全國聯(lián)保 關于我們 | 聯(lián)系我們 



 微信號:13812857865
微信號:13812857865





 添加微信
添加微信
 聯(lián)系我們
聯(lián)系我們
 電話咨詢
電話咨詢